After the catastrophic loss of the One Dollar Robot, I headed down to the local Budget Robotics Outlet a.k.a. the toy department at Big Lots. There I found a very cheap RC SUV with “Escalade” plastered on it. I’ve always wanted an Escalade so I plunked down $20 and headed home.

Now let’s be perfectly clear… as an RC toy, this thing was a piece of junk. When I got it home, I could see that one of the wires was hanging out of the bottom not even soldered to anything. After putting batteries in it, I tried it out. It went two inches under its own power and then quit. That’s okay. I didn’t buy it for use an RC toy.
This Escalade was going to become the next testbed for developing my rover. While the wiring and electronics were junk, the motor and steering mechanism were actually not bad. And the chassis was HUGE! I was going to be able to fit a ton of electronics in there and still have the Escalade body fit normally.
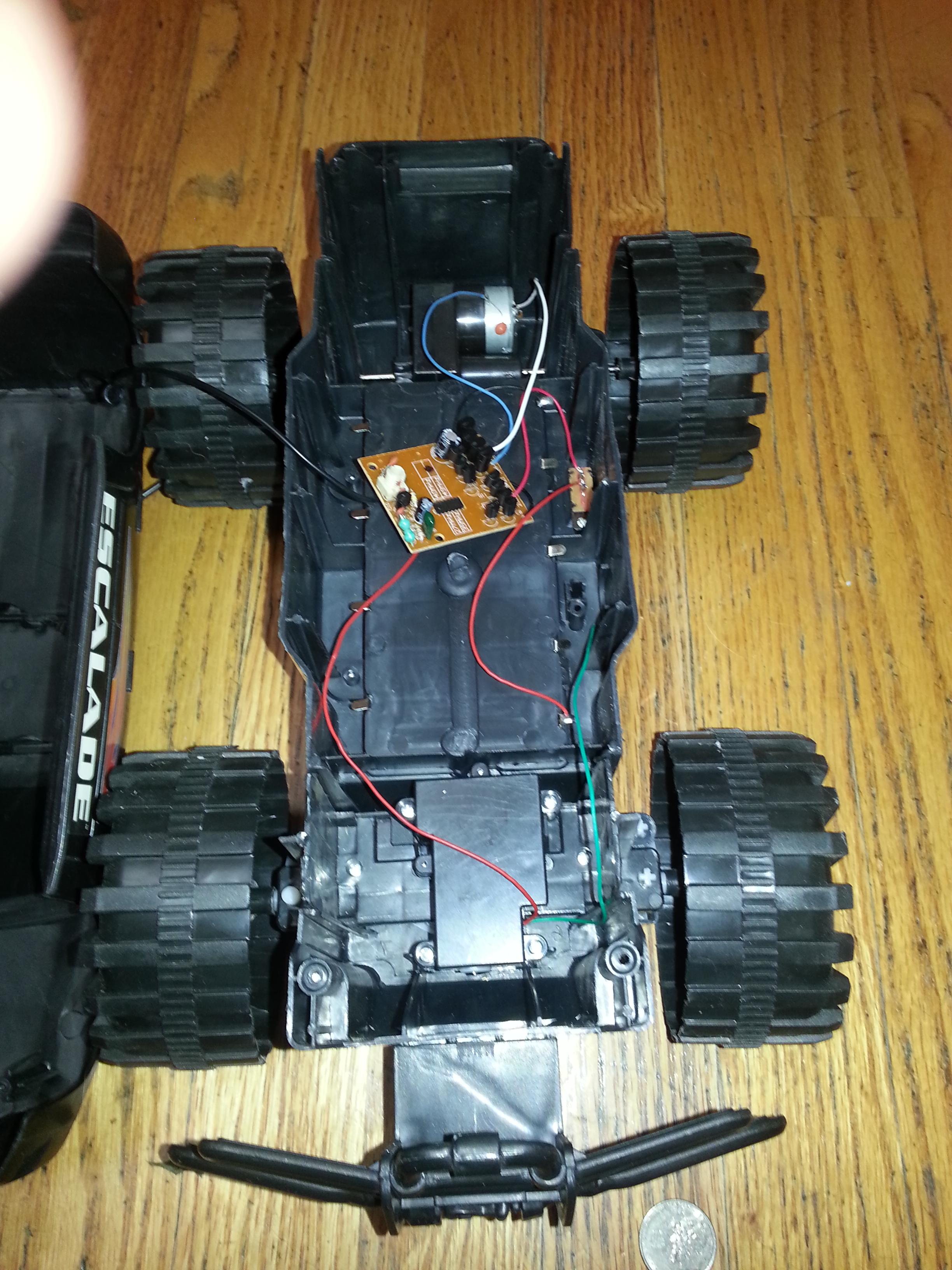
First order of business was to remove the body, take out the control board and throw it away. Then I removed all the factory wiring and soldered in some heavier gauge solid-core hook-up wire and mounted an IR distance sensor to the front bumper. Finally I was ready to put in some smarts. I started with the Arduino Uno and a breadboard containing a motor control IC. After I debugged that and got everything working. I moved it all to the much smaller Arduino Micro. When it was all said and done I was able to put in the Arduino, the breadboard, a gigantic 11,000 mAh battery pack AND still have room for a Raspberry PI later on. It doesn’t look like it in this picture but everything fits and the body goes on normally.

One thing neat about this car is that it has one DC motor in the back for moving and another one up front that steers the front wheels. So unlike the One Dollar Robot, this actually steers like a car.
This afternoon I was able to get it working with a basic obstacle avoidance algorithm. This coming week, I’m going to replace the IR sensor with a servo-mounted ultrasonic sensor and get it to steer around obstacles rather than use the simplistic stop, back up and turn approach that it currently uses.
I wonder where I can get some 3″ spinners to really trick it out…?
